总结
- 这篇文章提出了一种新的解决detection的网络结构
- 不同于R-CNN系列的多阶段结构,YOLO只是用一个传统CNN结构就输出了所有的预测信息
- YOLO的优势:
- 快,每秒45张图片(平均每张图片耗时22ms)同时还有一个不错的mAP: 63.4
- 处理整张图片而不是特定的一个proposal,有更少的背景误分类
- 特征更泛化(通过更高的艺术品人像识别率来证明)
- YOLO的劣势:
- 每个框的bounding box数目受限
- 每个框至多属于一类
- 由于上述原因对于小物体的检测效果不好
- Detection原理
- 把图像分为 S * S块
- 每个块输出B个bounding box信息
- 每个bounding box信息包含五项
- bounding box的中心的x y坐标
- bounding box的长和宽
- 这个bounding box包含物体的信心分
- 共计五项
- 此外每个块还输出在包含物体的情况下,物体所属分类的概率
- 模型就是CNN网络,综上模型最后一层的输出是S S (B * 5 + num of classes)的一个tensor
- 训练细节
- 使用ImageNet pre-train + fine-tune
- 在fine-tune阶段,把input_size扩大一倍(detection任务需要更清晰的图片)
- 对x,y,h,w进行归一化
- 平衡大小bounding box对损失的影响,对h,w开平方处理
- 对包含物体的块的损失部分做加权处理(*5)
- 对不包含物体的块的损失部分做减小权重处理(*0.5)
- 具体公式见loss function部分
VOC测试结果
- time: 22ms
- VOC 2007: 63.4%
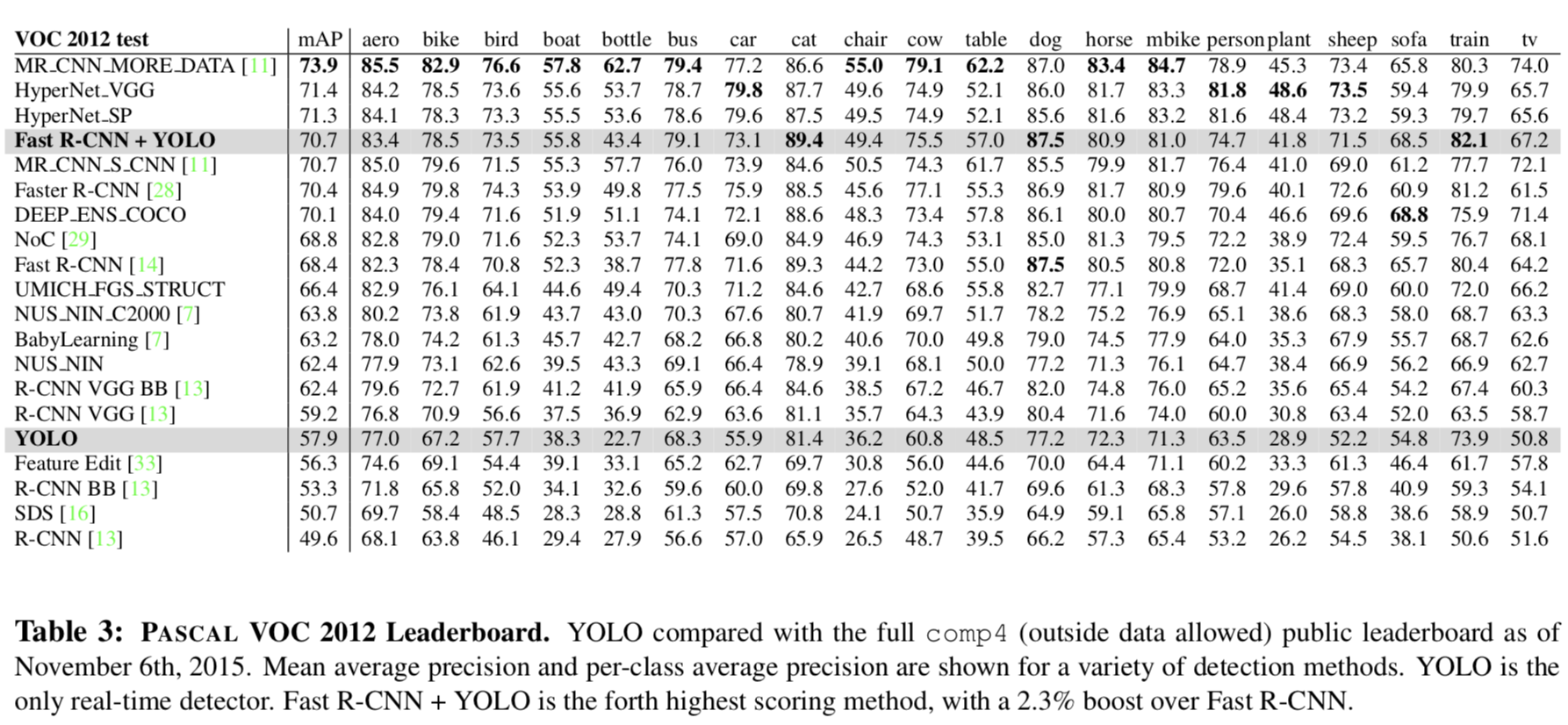
- VOC 2012: 57.9%
Abstract
We present YOLO, a new approach to object detection.
We frame object detection as a regression problem instead of classification problem.
less likely to predict false positives on background
Introduction
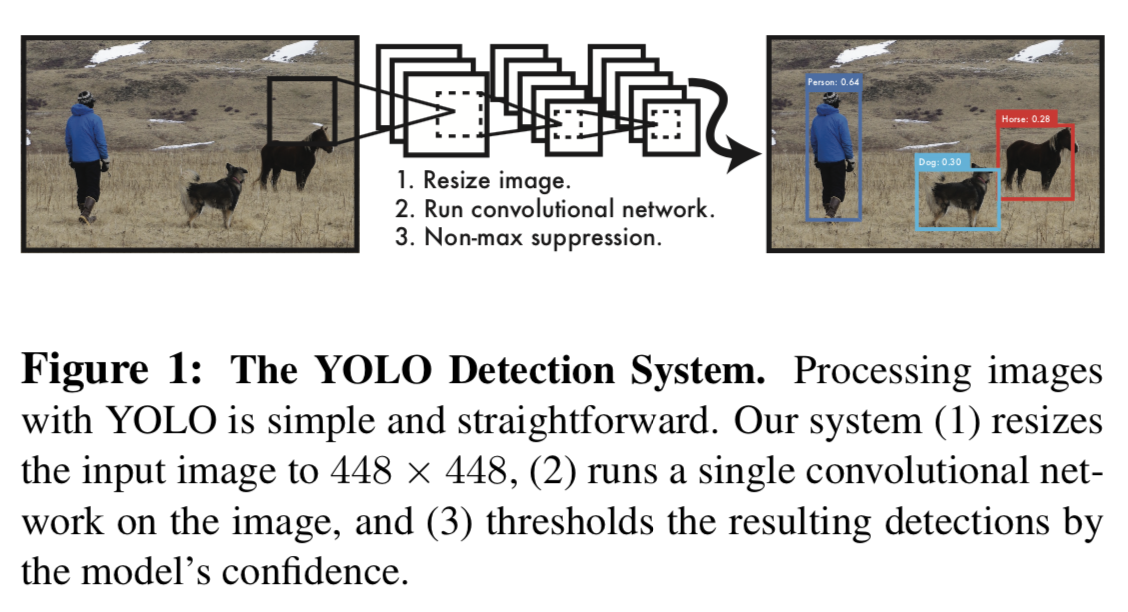
YOLO’s structure is refreshingly simple:
This unified model has several benefits:
- extremely fast
- makes less background errors because of reasoning globally about image
- learns generalizable representations of objects
Unified Detection
- Our system divides the input image into an S × S grid.
- If the center of an object falls into a grid cell, that grid cell is responsible for detecting that object.
- Each grid cell predicts B bounding boxes and confidence scores for those boxes.
- this confident scores reflect how confident the model is that the box contains an object
- and also how accurate it think the box is that it predicts
- We define confidence as $Pr(object) * IOU^{truth}_{pred}$:
- if no object exists in this cell, score should be zero
- otherwise we want the confident score to equal the intersection over union between the predict box and ground truth
- Each bounding consists of 5 predictions: x, y, w, h, confidence
- (x, y) represent the center of the box
- w and h represent wide and hight of the box
- Each grid cell also predicts C conditional class probabilities, $Pr(Class_i| Object)$
- We can get class-specific confidence scores for each box by:
In this paper we use S = 7, B = 2, C = 20
So our final prediction is a 7 7 30 tensor
Network Design
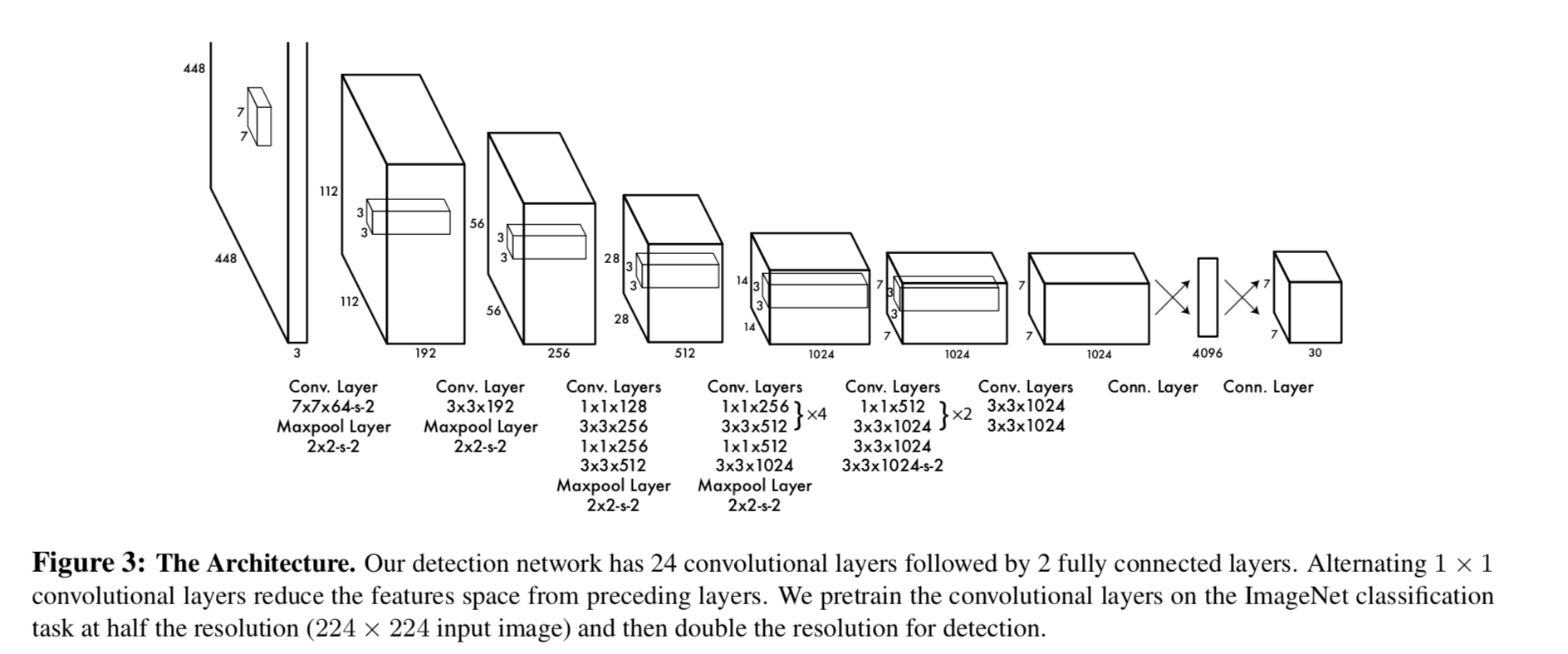
Fast YOLO uses a neural network with fewer convolutional layers (9 instead of 24) and fewer filters in those layers
Training
- pretrain convolutional layers on the ImageNet 1000-class competition dataset
- first 20 convolutional layers
- train for a week(amazing)
- convert the model to perform detection
- add four convolutional layers and two fully connected layers
- change input resolution from 224 224 to 448 448
- normalize the bounding box width and height by the image width and height so that they fall between 0 and 1(x, y too)
- use leaky rectified linear activation
- use sum-squared error
- easy to optimize
- weights localization error equally with classification error(flaw)
- the gradient from cells which have no object often overpowering the gradient from cells that do contain objects(flaw)
- equally weights errors in large boxes and small boxes(flaw)
- to remedy these flaws of sum-squared error
- increase the loss from bounding box coordinate predictions
- decrease the loss from confidence predictions for boxes that don’t contain objects
- set $\lambda_{coord} = 5$ and $\lambda_{noobj} = 0.5$ to accomplish this
- predict square root of the bounding box width and height instead of the width and height directly
- assign one predictor to be “responsible” for predicting an object based on which prediction has the highest current IOU with the ground truth
loss function:
- only penalizes classification error if an object is present in that grid cell
- only penalizes bounding box coordinate error if that predictor is “responsible” for the ground truth box
Inference
- very fast
- use Non-maximal suppression to fix multiple detections
Limitations of YOLO
- only predicts two boxes
- only have one class
- struggle to generalize to objects in new or unusual aspect ratios or configurations
- treats errors the same in small bounding boxes versus large bounding boxes
Comparison to Other Detection Systems
skip
Experiments
Comparison to Other Real-Time Systems
skip
VOC 2007 Error Analysis
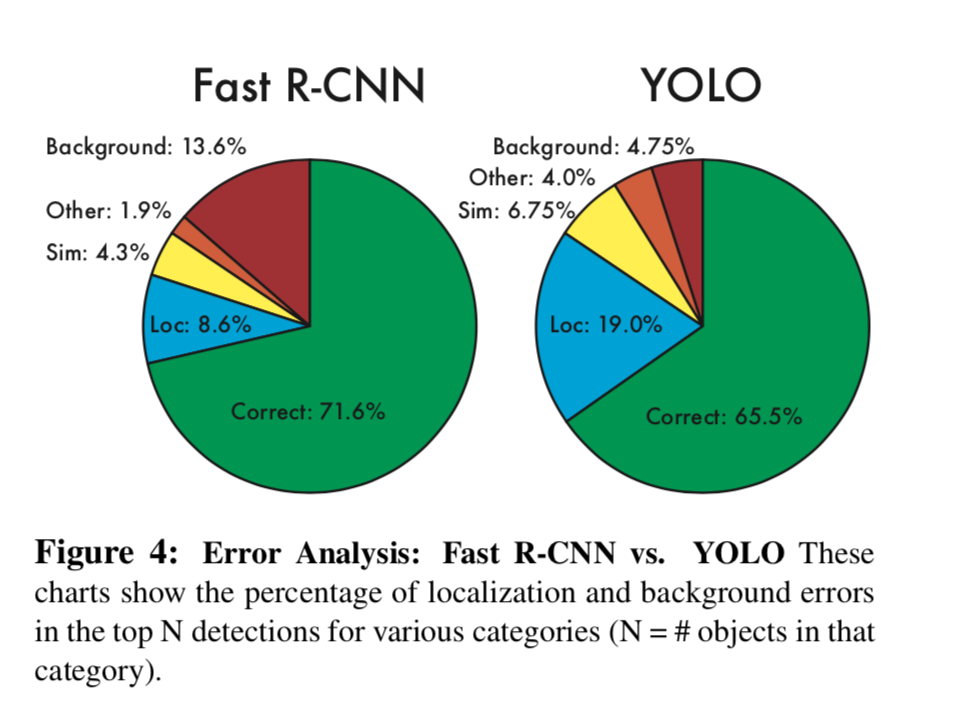
- YOLO struggles to localize objects correctly
- Fast R-CNN
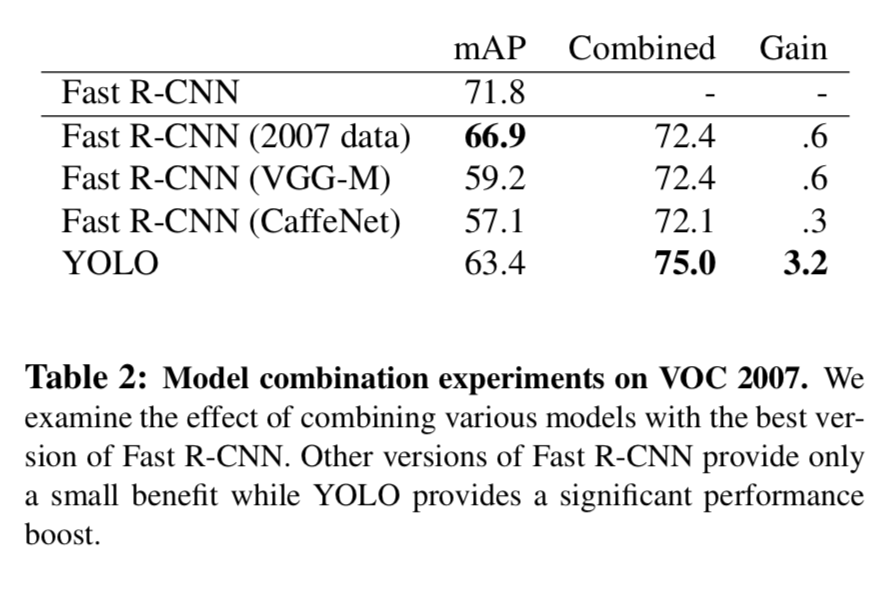
Combining Fast R-CNN and YOLO
By using YOLO to eliminate background detections from Fast R-CNN we get a significant boost in performance
VOC 2012 Results
Generalizability: Person Detection in Artwork
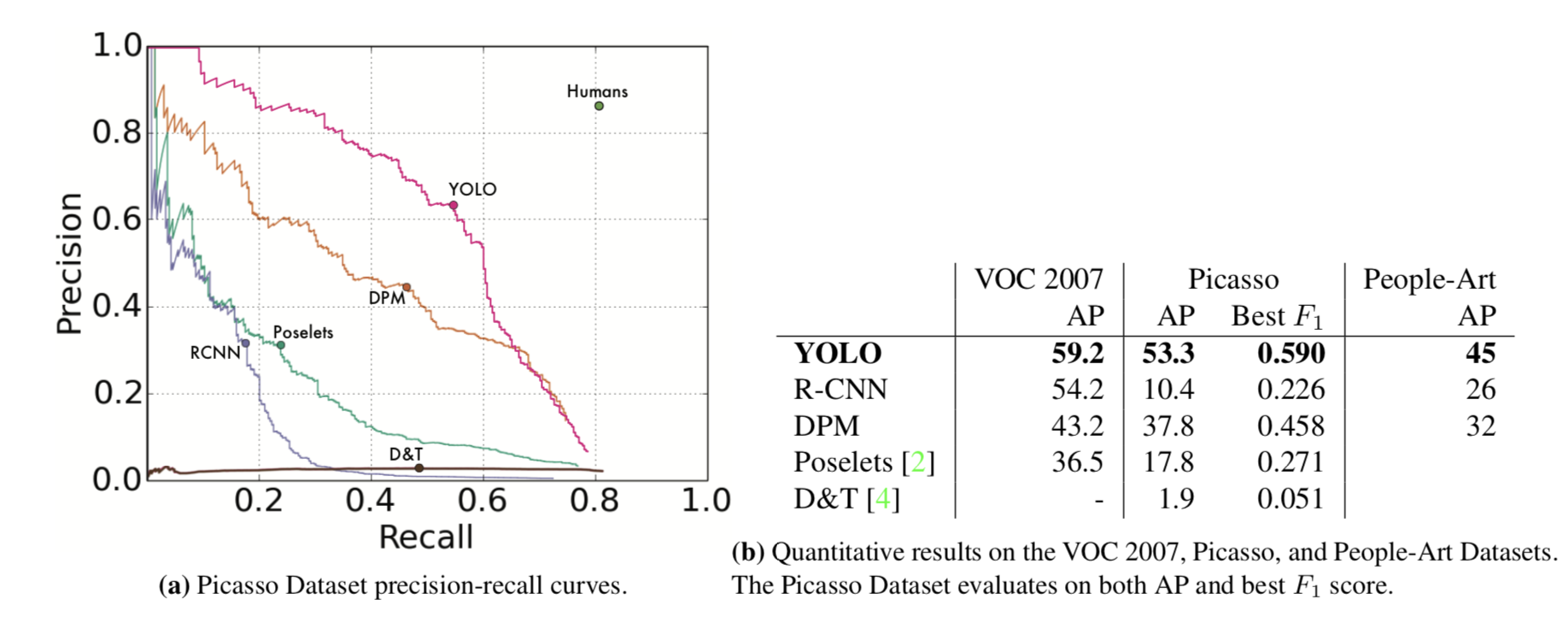
YOLO models the size and shape of objects, as well as relationships between objects and where objects commonly appear
Real-Time Detection In The Wild
perform well on webcam
Conclusion
skip